“`html
Mars yüzeyinde hareket etmek, dışarıdan bakıldığında oldukça basit bir işlem olarak algılanabilir; ancak arka planda son derece karmaşık bir planlama süreci devreye giriyor. NASA, Aralık 2025’te bu süreci köklü şekilde değiştirecek bir adım attı. Ajans, Mars’taki Jezero Krateri içinde görevlerini sürdüren Perseverance gezgin aracının rotasını, ilk kez gelişmiş bir dil modeli kullanarak oluşturdu.
Bu amaçla NASA, Anthropic tarafından geliştirilen Claude yapay zeka modelinden faydalanarak Perseverance için detaylı bir sürüş planı hazırladı.
8–10 Aralık tarihleri arasında Araç, Mars yüzeyinde yaklaşık 400 metre mesafe katetti ve bu yolu, Claude’un belirlediği rota üzerinden geçerek tamamladı. Söz konusu rota, zorlayıcı kaya parçalarının bulunduğu ve insan müdahalesinin uzun zaman alabileceği bir bölgeyi kapsıyordu.
Burada önemli olan, yapay zekanın aracı doğrudan kontrol etmemesi. Claude, sadece sürüş için gerekli rota noktalarını önerdi; bu noktalar daha sonra NASA mühendisleri tarafından kontrol edilerek onaylandı.
Özetle, Perseverance, komutlarını Dünya’dan aldı; fakat bu komutların temelini, yapay zeka oluşturmuştu.
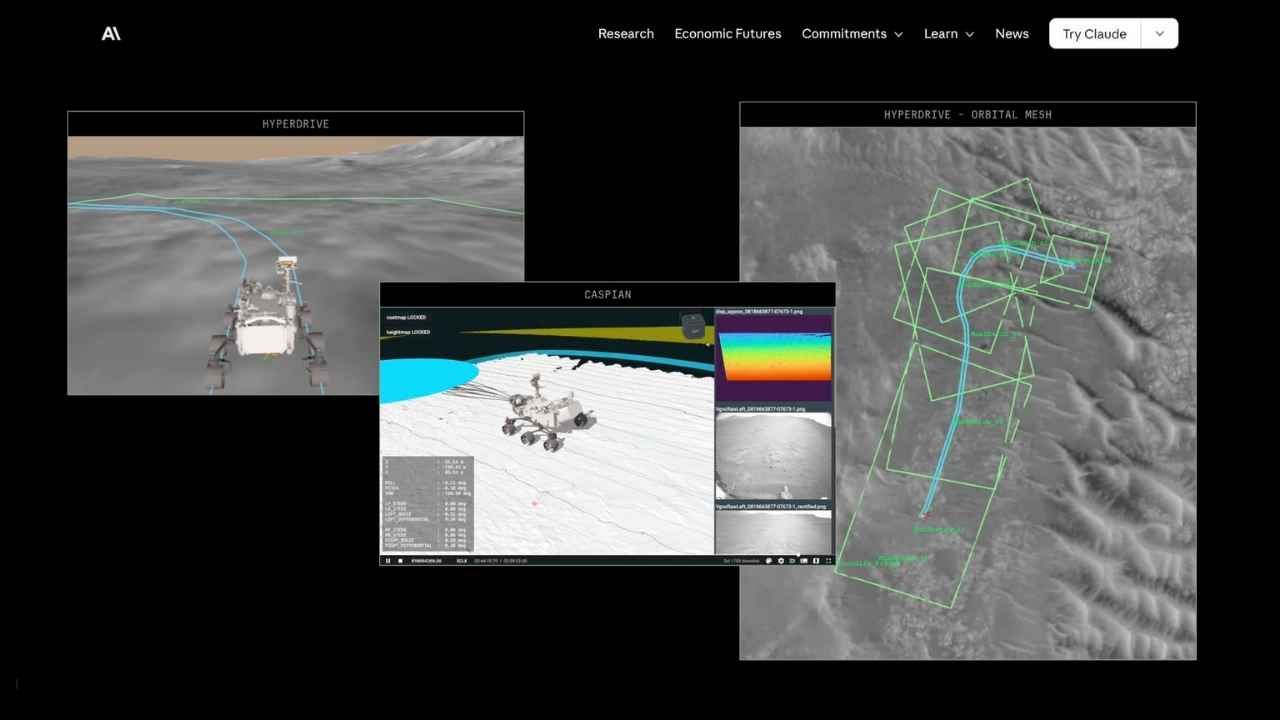
Mars’ta bir gezgin aracı yönlendirmek, görünenden çok daha titiz kararlar gerektiriyor. En küçük bir eğim, yumuşak zemin veya keskin kaya parçası, aracın kaymasına, tekerleklerinin boş dönmesine veya tamamen sıkışmasına yol açabilir. Bu nedenle NASA ekipleri, Perseverance’ın her sürüşünü, ayrıntılı olarak “ekmek kırıntısı” adını verdikleri yollarla manuel olarak planladı.
NASA, Mars yüzeyinde rota planlamasını yapay zekâya aktardı
Claude’un bu görevi üstlenebilmesi için NASA, modele Perseverance’ın yıllar içinde topladığı görüntüler, haritalar ve sürüş verilerinden oluşan kapsamlı bir veri seti sağladı.
Bunun ardından Claude, onar metrelik segmentler halinde rota noktaları oluşturarak, bu noktaları kendi içinde değerlendirip gerektiğinde yeniden düzenledi. Süreç, tek bir komuttan ziyade, sistemli bir planlama süreci olarak ilerledi.
Elde edilen rota, Jet Propulsion Laboratory (JPL) mühendisleri tarafından günlük olarak kullanılan simülasyon ortamında test edildi. Ekipler, Claude’un önerdiği planda ufak değişiklikler yapma ihtiyacı hissettiler.
Bu değişikliklerin bir kısmı, Claude’un planlama aşamasında erişemediği, daha yakın alanlardan alınan güncel görüntülere dayanıyordu. Nihai rota bu kontrollerin ardından Perseverance’a iletildi.
NASA’ya göre bu yaklaşım, rota planlama süresini yarı yarıya azaltma potansiyeline sahip. Daha hızlı planlama, mühendislerin daha fazla sürüşe izin vermesine olanak tanıyor. Bu da Perseverance’ın daha fazla örnek toplaması, geniş alanları inceleyebilmesi ve bilimsel verimliliğinin artması demek.
Bu gelişme, ajansın mevcut koşulları göz önüne alındığında ayrı bir önem taşıyor. NASA, son dönemde ciddi personel kayıpları yaşadı ve bilim bütçesi üzerindeki baskılar devam etmekte. Daha az insan kaynağıyla daha fazla görev yürütme ihtiyacı, otomasyon ve yapay zeka destekli çözümlerin kaçınılmaz hâle gelmesine yol açıyor.
Anthropic cephesi açısından bu çalışma, Claude’un yeteneklerini gerçek dünya koşullarında kanıtlayan önemli bir örnek sundu. Daha önce basit oyun senaryolarında bile zorluk çeken bir modelin, Mars yüzeyinde güvenli bir rota planlayabilmesi, büyük dil modellerinin kullanım alanlarının hızla geliştiğinin bir göstergesi.
NASA, gelecekte yapay zeka destekli otonom sistemlerin yalnızca Mars’ta değil, Güneş Sistemi’nin daha uzak bölgelerindeki keşif araçlarında da değerlendirilmesini planlıyor. Bu yaklaşım, insan müdahalesinin gecikmeli veya sınırlı olduğu görevlerde, keşif kapasitesini doğrudan etkileyen bir unsur olarak önem kazanıyor.
Teknoblog, teknolojik gelişmeleri çeşitli platformlarda düzenli olarak paylaşıyor. WhatsApp kanalında öne çıkan haberleri anlık olarak bildirirken, Google Haberler üzerinden güncel içerikleri sunuyor, Instagram ve X hesaplarında dikkat çekici başlıkları özetliyor, YouTube kanalında ise ürün incelemeleri ve detaylı anlatımlarla içeriği zenginleştiriyor.
“`






